



工业相机是机器视觉系统中的一个关键组件,其基本的功能是以工业级的高品质将光信号转变成有序的电信号。工业相机一般由图像传感器、内部处理电路、数据接口、IO 接口、光学接口等组成。 相机的核心是传感器,现代的传感器都是固态电子器件,每个都包含了上百万个离散的光探测区域,这些光探测区域称为像素。
一、工业相机的分类
工业相机的种类很多,图1展示了几种不同分类依据下工业相机的种类划分。

图1 工业相机的分类
1、传感器类型
根据相机传感器类型不同,可以分为CCD(Charged Coupled Device,电荷耦合器件)和CMOS(Complementary Metal-Oxide Semiconductor,互补金属氧化物半导体)两类。
CCD传感器是一个硅片,包含了许多的感光区域,如图所示。CCD的工作原理是将光信号转换成电信号,并按照顺序传送到一个共同输出结构,然后把电荷转换成电压,接着再将这些信号送到缓冲器并存储到芯片外,如图2所示。

图2 CCD结构示意图
在CMOS传感器中,感光像素上的电荷将在像素区域中被转换为电压,信号以乘以行和列进行多路复用,加增在芯片数字模拟转换器(DAC)上。每个区域由一个光电二极管和三个晶体管组成,执行着像素的重置或激活、电荷的放大和转换以及选择或多路复用的功能,如图3所示。

图3 CMOS结构示意图
CCD 和CMOS在不同的应用场景下各有优势,如表1所示。
| 传感器 | CCD | CMOS |
| 设计技术 | 单一感光器 | 感光器连接放大器 |
| 像素信号 | 电子包 | 电压 |
| 芯片信号 | 模拟 | 数字 |
| 灵敏度 | 较高 | 感光开口小,灵敏度低 |
| 填充因子 | 高 | 较低 |
| 噪点比 | 单一放大,噪点低 | 百万放大,噪点高 |
| 功耗比 | 需外加电压,功耗高 | 直接放大,功耗低 |
| 信息读取方式 | 需要外部电压控制,复杂 | 直接读取电流信号,简单 |
| 信息读取速度 | 较慢 | 快 |
| 曝光方式 | 全局快门 | 卷帘、全局快门均有 |
| 成本 | 高 | 较低 |
表1 CCD和CMOS传感器的对比
CCD具有信噪比高、通透感强、色彩还原能力佳等优点,广泛应用于屏幕检测、交通、医疗等高端领域,但是由于CCD成本高、功耗大制约了其市场发展的空间。随着CMOS工艺和技术的不断提升以及高端CMOS价格的不断下降,CMOS将会在机器视觉领域中占据越来越重要的地位。
2、快门类型
快门是一种用于控制感光元件或者胶片曝光时间的机械装置。为了保护相机内的感光元件或者胶片不至于曝光,快门总是关闭的。设定好快门速度后,只要按下相机的快门释放钮,在快门开启与闭合的时间内,通过镜头的光线会使相机内的感光元件或者胶片获得正确的曝光。
传感器按曝光形式不同,分为全局快门(Global Shutter) 和卷帘快门(Rolling Shutter)。一般来说,CCD传感器都是全局快门,CMOS传感器有全局快门和卷帘快门两种。全局快门是指整个芯片的每行像素全部同时进行曝光,每一行像素的曝光开始和结束时间相同。曝光完成后,数据开始逐行读出。相机传感器曝光、数据读出的时间长度一致,但结束数据读出的时刻不一致,如图4所示。

图4 全局快门的原理
卷帘快门是指芯片开始曝光的时候,每行均按照顺序依次开始曝光。第一行曝光结束后,便立即开始读出数据,数据完全读出后,下一行再开始读出数据,如此循环。不同行的像素曝光开始和结束时间不同,如图5所示。
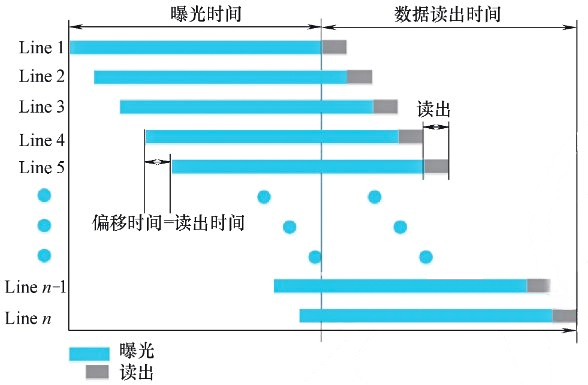
图5 卷帘快门的原理
在拍摄运动物体时,全局快门和卷帘快门的效果有较大差异。如果采用全局快门方式曝光,所有像素在同一时间段内曝光,会将物体“冻结”拍摄;如果采用卷帘快门方式曝光,由于不同行像素曝光的开始时间和结束时间均有差异,会出现图像弯曲变形的现象。因此,卷帘快门相机通常应用于静态或者低速场合,而全局快门通常应用于动态场合,如高速飞拍等。
3、数据接口
工业相机的数据接口是指相机进行图像采集之后将数据传输到计算机的接口,每种接口遵循一定的通信协议。按照数据接口类型可以分为千兆网 (GigE)、万兆网 (10GigE)、USB 3.0、Camera Link、CoaXPress等多种类型的数据传输接口。不同的数据接口有不同的特性,用户可以从线缆长度、传输速度、延迟、成本等多方面的对比来进行选择。
| 接口 | 千兆 | 万兆 | USB 3.0 | CameraLink | CoaXPress |
| 速度/(Gbit/s) | 0.1 | 1 | 0.3 | 0.64 | 2.56(4根) |
| 距离/m |
100(双绞线) >100(光纤) |
100(双绞线) >100(光纤) |
5(标准无源电缆) >5(光纤) |
10 |
45(CXP-6) 35(CXP-12) |
| 成本 | 低 | 中 | 低 | 高 | 高 |
| 优点 |
1.拓展性好 2.性价比高 3.可管理维护性好 4.广泛适用性好 |
1.带宽高 2.拓展性好 3.可管理维护性好 4.架设方案简单 |
1.支持热插拔 2.使用便捷 3.可连接多个设备 4.相机可通过线缆供电 |
1.高速率 2.抗干扰能力强 3.功耗低
|
1.数据传输量大 2.传输距离长 3.可选择传输距离和传输量 4.价格低廉,易集成 5.支持热插拔 |
| 缺点 |
1.CPU占用率高 2.对主机的配置要求高 |
1.CPU占用率高 2.对主机的配置要求高 |
1.稳定性较差 2.距离短 |
1.价格高 2.需单独供电 |
1.成本高 2.架设复杂度高 |
表2 数据接口对比
二、工业相机的性能参数
工业相机有许多参数,客户可以根据实际的使用需求选择合适的参数。下面将介绍相机的重要性能参数。
1、分辨率(Resolution)
分辨率主要用于描述相机对被摄物的分辨能力。在同样大的视场成像时,分辨率越高,对细节的展示越明显。一般情况下,面阵相机的分辨率是指相机感光芯片的像素个数(Pixels)。相机分辨率有两种表现形式,一种以“感光器件宽度方向的像素个数×感光器件高度方向的像素个数”表示,另一种以“相机的分辨率标称值”表示,比如200万像素。
2、像元尺寸(Pixel Size)
像元尺寸是指芯片像元阵列上每个像元的实际物理尺寸。当靶面尺寸相同时,像元尺寸越小,分辨率就越高。
3、靶面尺寸
靶面尺寸是指相机图像传感器的感光面积,一般用对角线的长度来标识,单位为 in(英寸)。通常情况下,当像元尺寸等其他条件一定时,靶面越大,相机的分辨率就越高。
4、帧率(Frame Rate)/行频(Line Frequency)
帧率/行频是指相机采集和传输图像的速率。对于面阵相机,一般用每秒采集的帧数(Frames per Second,fps),即帧率来表示。帧率越高,画面就越流畅。对于线阵相机,一般用每秒采集的行数(Hz),即行频来表示。
帧率(行频)=相机每秒出图数(帧或行)/单帧(行)出图所耗时间(s)
一般来说,相机的分辨率越高,其帧率就越低,因为相机的分辨率越高,其采集的数字图像数据就越大,采集时间、数据传输时间可能也就越长。当所看画面的帧率高于每秒10-12帧时,人看到的画面就是连续的。在工业生产中,可能会遇到需要拍摄高速运行物体(俗称“飞拍”)的情况,这时需要重点考虑这一参数,应该选用较高帧率的相机,从而避免采集到的图片出现拖影的情况。
5、像素位深(Pixel Depth)
像素位深(像素深度、图像深度、灰度)是指储存单个像素所用的位数,决定着灰度图像每个像素可能的灰度级数或者彩色图像每个像素可能的颜色数。位数越高读出的细节越丰富,但是较高的比特位数会拖慢帧率。
6、曝光时间
曝光时间(快门时间)是指像元感光的时间。在相同外部条件下,曝光时间越长,图像亮度就越高,但是过长的曝光时间会使得帧率/行频降低。不同的相机曝光上下限不同。在一些飞拍应用中,曝光不够短会导致图像拖影,因此需要工业相机具备在极短的曝光时间内成像的特性。
7、信噪比(Signal-to-Noise Ratio, SNR)
信噪比是指图像中信号与噪声的比例,单位为分贝(dB)。图像信噪比越高,图像质量就越好。
8、动态范围
动态范围是指最低可检测光信号和最高可检测光信号之间的差异,反映了工业相机探测光信号的范围。动态范围越大,相机对于图像上亮处和暗处的细节展现就越明显。
9、光谱响应(Spectral Range)
光谱响应特性是指芯片对于不同波段光线的响应能力,通常用光谱响应曲线来表征。在选用工业相机时通常需要根据实际应用场景光源的波段来选择芯片以达到最好的成像效果。
